Contact us here for any inquiry. You can also follow us on SLACK.
TrackingNet: A Large-Scale Dataset and Benchmark for Object Tracking in the Wild.
Matthias Mueller*, Adel Bibi*, Silvio Giancola*, Salman Al-Subaihi and Bernard Ghanem
Despite the numerous developments in object tracking, further development of current tracking algorithms is limited by small and mostly saturated datasets. As a matter of fact, data-hungry trackers based on deep-learning currently rely on object detection datasets due to the scarcity of dedicated large-scale tracking datasets. In this work, we present TrackingNet, the first large-scale dataset and benchmark for object tracking in the wild. We provide more than 30K videos with more than 14 million dense bounding box annotations. Our dataset covers a wide selection of object classes in broad and diverse context. By releasing such a large-scale dataset, we expect deep trackers to further improve and generalize. In addition, we introduce a new benchmark composed of 500 novel videos, modeled with a distribution similar to our training dataset. By sequestering the annotation of the test set and providing an online evaluation server, we provide a fair benchmark for future development of object trackers. Deep trackers fine-tuned on a fraction of our dataset improve their performance by up to 1.6% on OTB100 and up to 1.7% on TrackingNet Test. We provide an extensive benchmark on TrackingNet by evaluating more than 20 trackers. Our results suggest that object tracking in the wild is far from being solved.
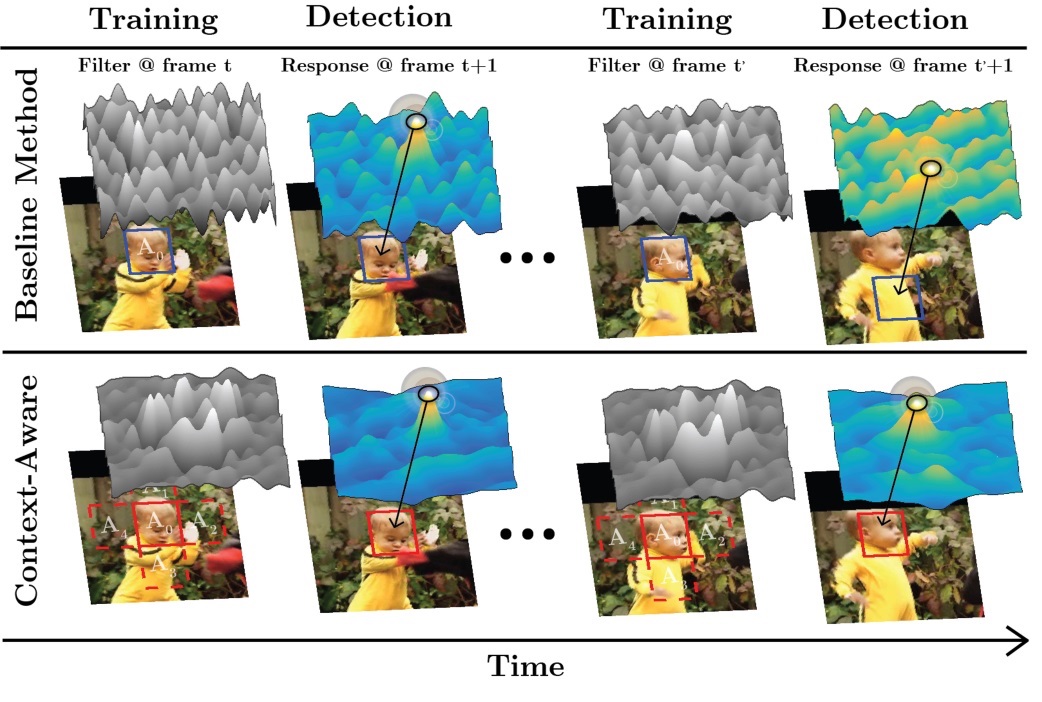
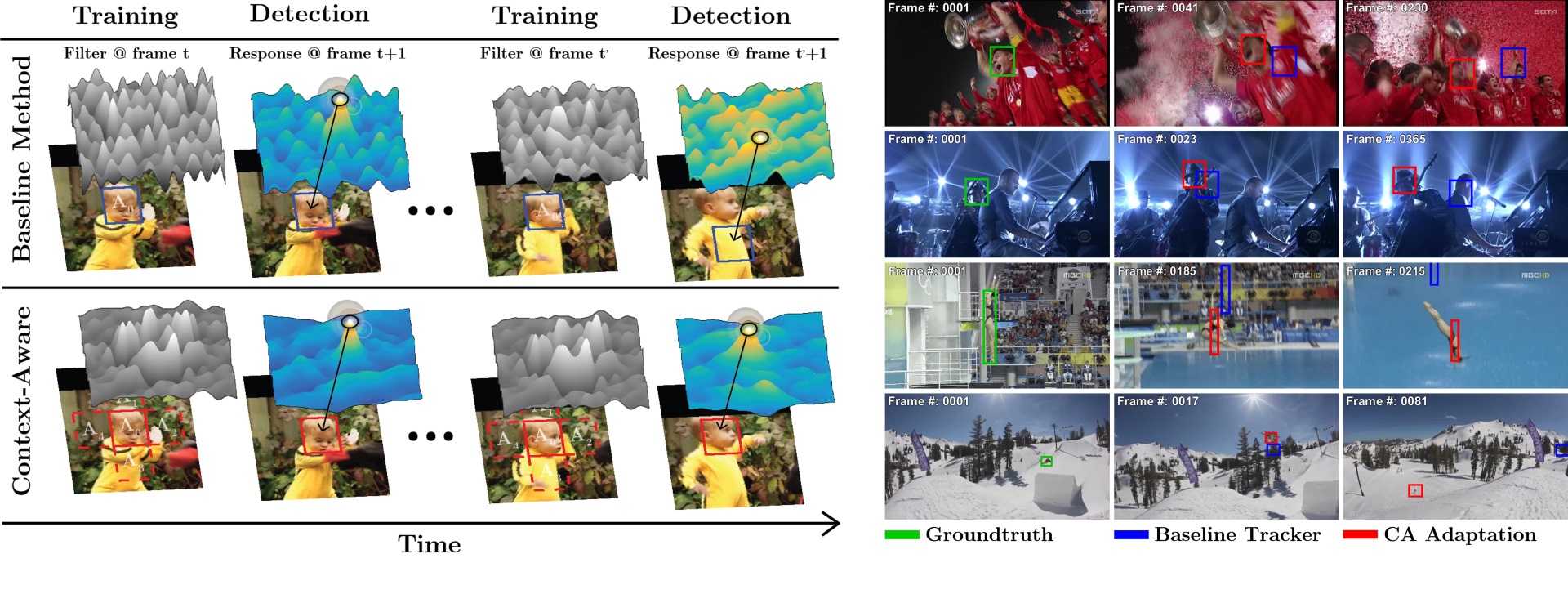
Correlation filter (CF) based trackers have recently gained a lot of popularity due to their impressive performance on benchmark datasets, while maintaining high frame rates. A significant amount of recent research focuses on the incorporation of stronger features for a richer representation of the tracking target. However, this only helps to discriminate the target from background within a small neighborhood. In this paper, we present a framework that allows the explicit incorporation of global context within CF trackers. We reformulate the original optimization problem and provide a closed form solution for single and multidimensional features in the primal and dual domain. Extensive experiments demonstrate that this framework significantly improves the performance of many CF trackers with only a modest impact on frame rate.
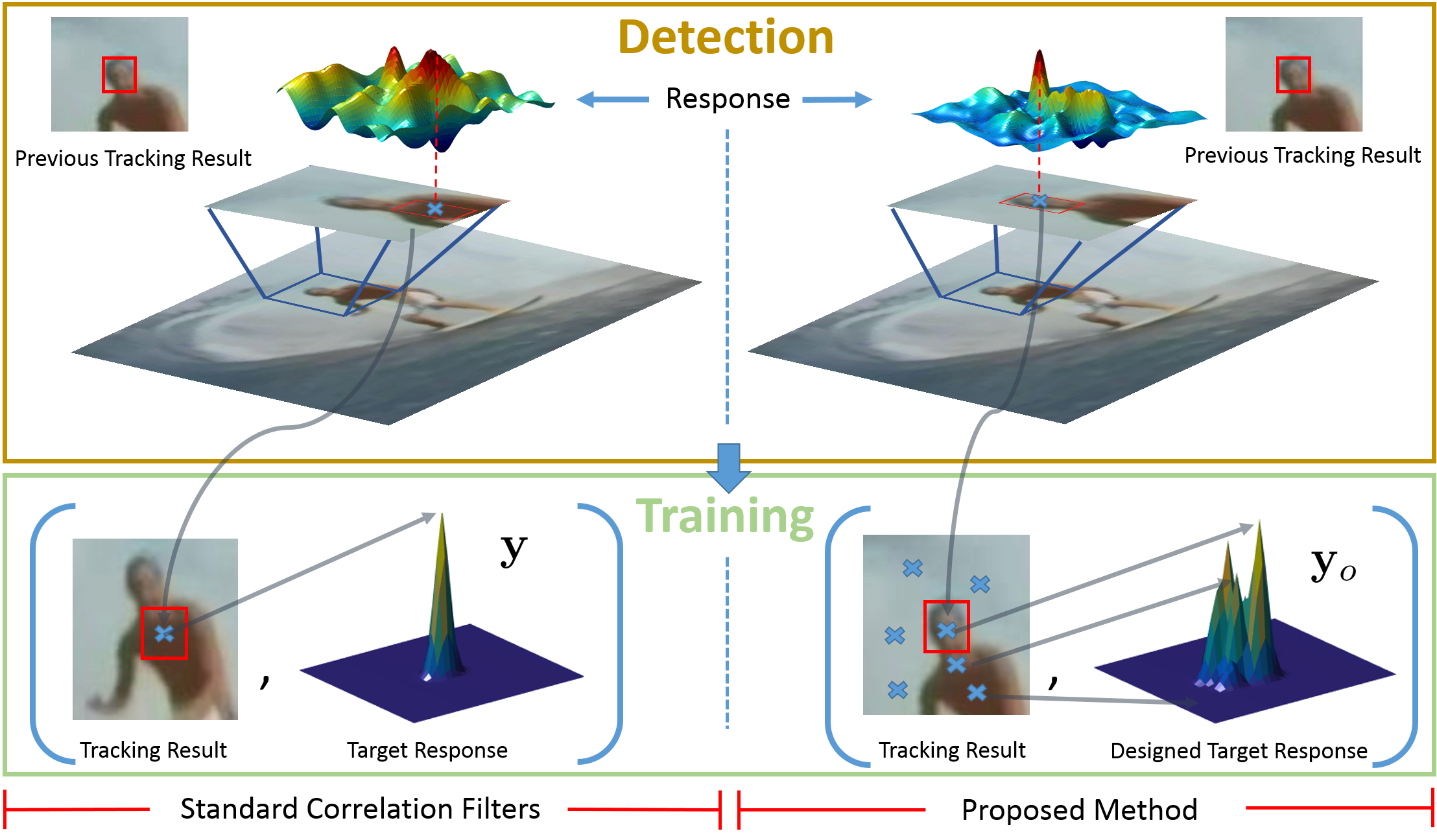
Target Response Adaptation for Correlation Filter Tracking
Adel Bibi, Matthias Mueller and Bernard Ghanem
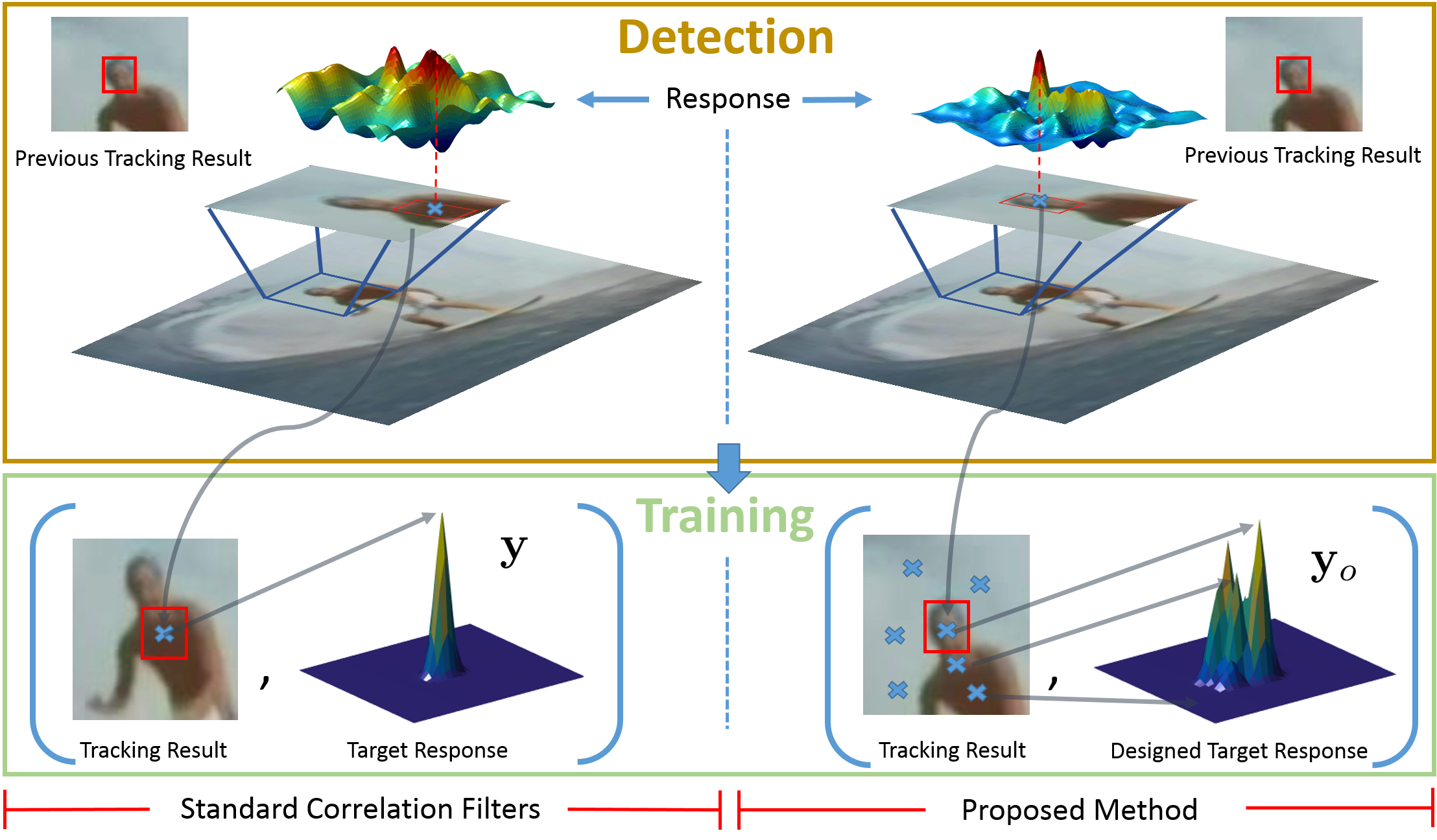
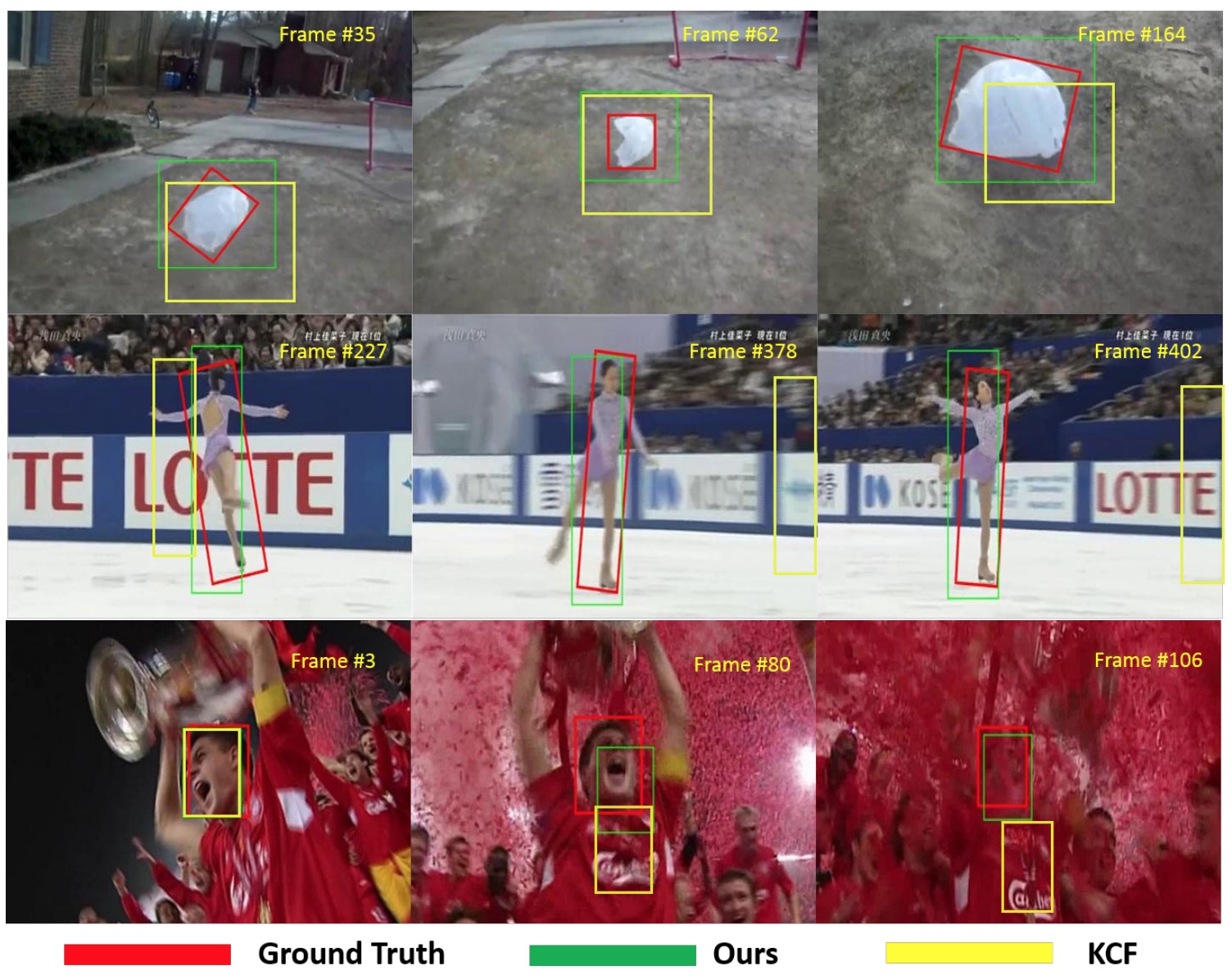
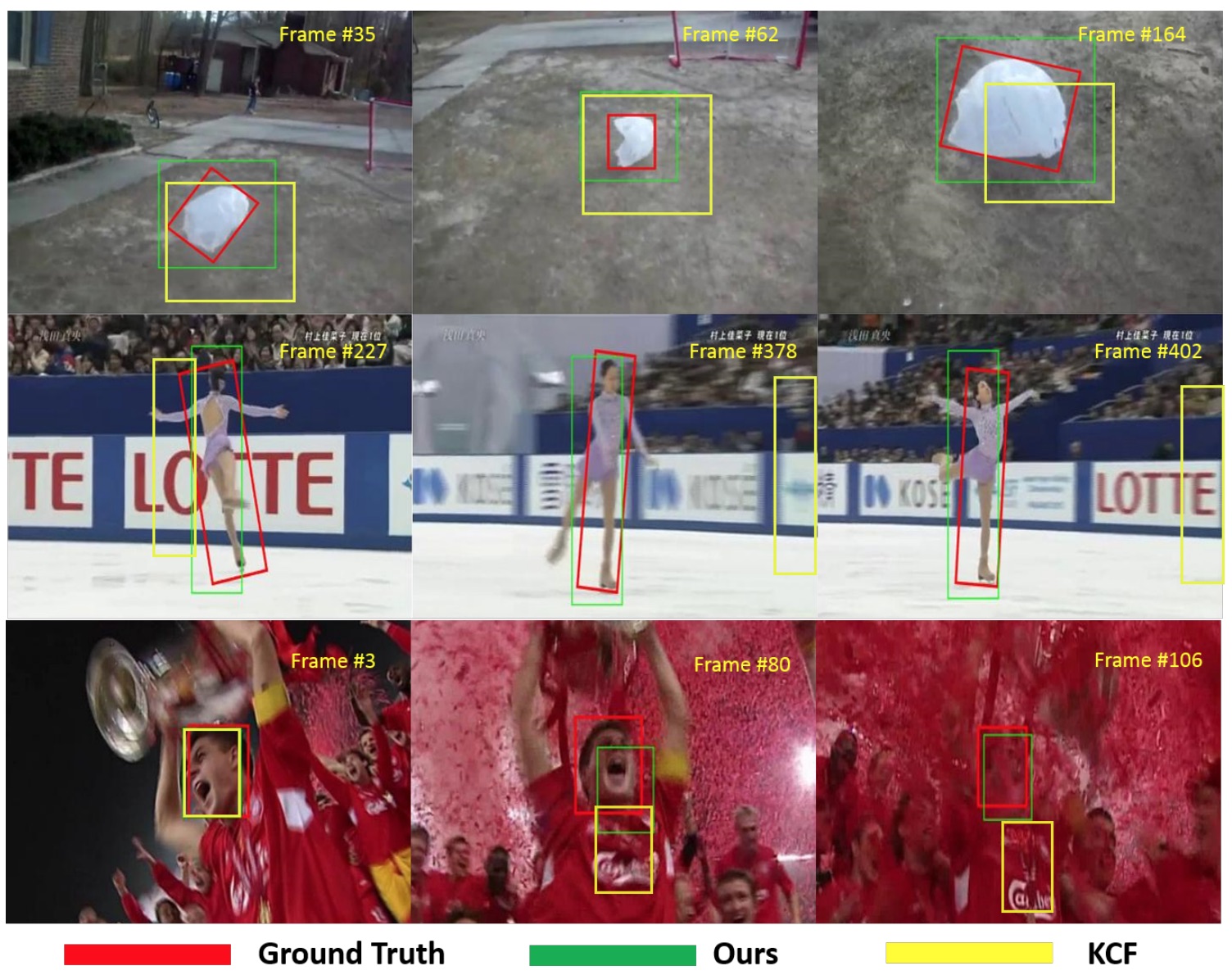
Most correlation filter (CF) based trackers utilize the circulant structure of the training data to learn a linear filter that best regresses this data to a hand-crafted target response. These circularly shifted patches are only approximations to actual translations in the image, which become unreliable in many realistic tracking scenarios including fast motion, occlusion, etc. In these cases, the traditional use of a single centered Gaussian as the target response impedes tracker performance and can lead to unrecoverable drift. To circumvent this major drawback, we propose a generic framework that can adaptively change the target response from frame to frame, so that the tracker is less sensitive to the cases where circular shifts do not reliably approximate translations. To do that, we reformulate the underlying optimization to solve for both the filter and target response jointly, where the latter is regularized by measurements made using actual translations. This joint problem has a closed form solution and thus allows for multiple templates, kernels, and multi-dimensional features. Extensive experiments on the popular OTB100 benchmark [19] show that our target adaptive framework can be combined with many CF trackers to realize significant overall performance improvement (ranging from 3%-13.5% in precision and 3.2%-13% in accuracy), especially in categories where this adaptation is necessary (e.g. fast motion, motion blur, etc.).
This paper identifies the major drawbacks of a very computationally efficient and state-of-the-art-tracker known as the Kernelized Correlation Filter (KCF) tracker. These drawbacks include an assumed fixed scale of the target in every frame, as well as, a heuristic update strategy of the filter taps to incorporate historical tracking information (i.e. simple linear combination of taps from the previous frame). In our approach, we update the scale of the tracker by maximizing over the posterior distribution of a grid of scales. As for the filter update, we prove and show that it is possible to use all previous training examples to update the filter taps very efficiently using fixed-point optimization. We validate the efficacy of our approach on two tracking datasets, VOT2014 and VOT2015.